Radar, Technik und Anwendungen

Antennenmontage beim ASR (Flughafenradar) WIEN SCHWECHAT
Geschichte des Radars:
Anlagenprinzipien:
Radaranlagen dienen dazu, die für die Standortbestimmung erforderlichen Informationen zu liefern:
- die Relativrichtung eines Zieles zur ortenden Station
- die Entfernung des Zieles zur ortenden Station
Dazu werden von einer Abfragestation (zumeist einer Radarstation am Boden) starke elektromagnetische Wellen ausgesendet, die von Hindernissen reflektiert und von der aussendenden Station wieder empfangen werden. Aus der Laufzeit der Signale lässt sich die Entfernung, und aus der Winkelstellung der Antenne die Relativrichtung zum reflektierenden Objekt bestimmen.
Systeme die rein nach diesem Prinzip arbeiten, nennt man Primärradarsysteme
- PRIMÄRRADAR, passive Funkortung:
Erfassung von Gegenständen – in unserem Fall Luftfahrzeugen - nach Richtung, Entfernung (und auch der Höhe bei militärischen Geräten) durch Verwendung reflektierender Funksignale.
In der modernen Flugsicherung reichen diese reinen Positionsinformationen alleine aber nicht mehr aus. Österreich liegt geografisch inmitten der Hauptverkehrsströme in Europa, sodass wir durchaus weit mehr als 100 Luftfahrzeuge gleichzeitig in unserem Luftraum (unserer „Flight Information Region“) haben können. Bedenkt man dazu, dass jedes dieser Luftfahrzeuge pro Sekunde fast einen Viertelkilometer Weg zurücklegt, dann bleibt nicht sehr viel Zeit um herumrätseln zu können „welches der empfangenen Echos jetzt wohl welches Flugzeug sein könnte".
Die zivilen Flugsicherungen benötigen daher unmittelbar un schnellstens die Identität des Echos, und damit auch gleich die Kenntnis über seinen nächsten geplanten Flugweg. Den erfahren sie nämlich aus dem zur Identität dazu passenden Flugplan. Sie sind daher schon vor Jahren auf ein Prinzip umgestiegen, das einen echten Datenaustausch mit dem georteten Zeil ermöglicht. Man nennt ein solches Prinzip "aktive Funkortung". In diesem Fall sendet die abfragende Station ein spezielles Abfragesignal in den Raum hinaus, und jedes Bordsystem das diese Abfrage empfängt schickt eine Reihe von Antwortdaten retour.
- aktive Funkortung, auch genannt SEKUNDÄRRADAR:
Erfassung von Gegenständen – in unserem Fall Luftfahrzeugen - nach Richtung, Entfernung und Höhe durch Auswertung ihrer Funk-Antwortsignale, deren Ausstrahlung durch Funk-Abfragesignale der ortenden (Radar-)Station ausgelöst wurde.
Während in den Anfangszeiten dieser Technologie die Antwortdaten nur rein aus den Elementen Identität (in Form einer 4stelligen Zahlen-ID) und aktueller Flughöhe bestanden - die sogenanten Mode A/C-Aussendungen, ist es mit Einführung der sogenannten Mode-S Technologie möglich geworden ganze Datensätze aus dem Luftfahrzeug abzufragen und in das Bodensystem einzuspeisen. Unter diesen Daten finden sich in ganz modernen Luftfahrzeugen inzwischen auch schon ihre geogrfischen Positionsmeldungen - der Datensatz nennt sich ADS-B "Automated Dependent Surveilance - Broadcast"
Verwendete Frequenzbänder in der Radartechnik:
Frequenz Band |
Wellenlänge/ Frequenz/ Reichweite |
Verwendet für: |
|
L-Band |
23 cm / ~ 1,3 GHz / 160 NM |
ENR Enroute Surveillance Radar |
|
S-Band |
10 cm / ~ 3 GHz / 60 NM |
ASR Airport Surveillance Radar, für Anflugsektoren auf Flughäfen |
|
C-Band |
5-6 cm / 6-5 GHz / 200 km |
Typisch für Einsatz als WXR (Wetterradar). Es gibt hier Frequenzen die sich besonders gut zur Ortung von Wettererscheinungen eignen. |
|
X-Band |
3 cm / ~ 10 GHz / 10 NM |
PAR Precision Approach Radar, für Anflüge auf Pisten. Hauptsächlich im militärischen Bereich verwendet. |
|
KU-Band |
2 cm / ~ 16 GHz / 5 km |
SMR Surface Movement Radar, zur Erkennung von Objekten auf dem Flughafenvorfeld und den Pisten |
Alle Sekundärradarsysteme verwenden weltweit das gleiche Frequenzpaar:
|
Sender (Abfrage) |
1030 MHz |
SSR Interrogation |
|
Transponder (Antwort) |
1090 MHz |
SSR replies (= Antwort auf eine Abfrage) |
Wie man sich leicht vorstellen kann, kommt es inzwischen in der Umgebung großer Verkehrsflughäfen vermehrt zu Kollisionen von Datenpaketen, wenn alle die gleiche Frequenzen benutzen müssen.
Was zeigt das Radarsystem dem Lotsen an
Bei dieser Verkehrsdichte ist es nicht mehr möglich die vielen hundert im Luftraum befindlichen Ziele nur als Blips auf einem Schirm zu sehen und dann noch mit Papierlisten zu verwalten oder ihre eingereichten Flugpläne aus Aktenordnern herauszusuchen. So etwas bewältigt man nur mehr mittels IT-Unterstützung.
Die im Land verteilt stehenden Radarbodenstationen senden daher ihre gesammelten Informationen, also die ermittelten Positionsdaten aber auch die aus der Mode-S Übertragung erhaltenen Flugdaten als digitalisierte Daten im international genormten ASTERIX-Datenformat in einen zentralen Rechencluster, bei uns genannt das ATM-System.
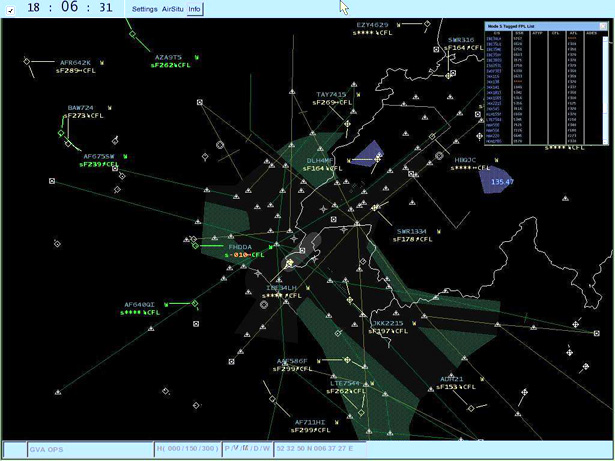
Das ATM-System verwaltet nun alle in der Systemarea errechneten Flugziele und deren dazugehörige Daten im Speicher, und verteilt diese an die Arbeitsplätze der Lotsen, an die Controller Working Positions CWP. Dort an der CWP bekommt jeder Lotse das für seinen Sektor notwendige Luftlagebild, das sogenannte Air Situation Display.

Symbolfoto Air Situation Display
Moderne Air Situation Displays sind interaktiv bedienbar, und unterstützen den Lotsen auch mit einer Reihe von ständig durchgeführten Sicherheitsberechnungen, wie zB. Kollisionswarnungen (MTCD - Medium Term Conflict Detection und STCA - Short Term Collision Alert)
Eien echte Flugsicherungskonsole mit modernem TopSky Radarscreen kann im Militärluftfahrtmuseum ZELTWEG besichtigt werden. Siehe dazu unseren Artikel ATCNEA zeigt eine Flugsicherungskonsole in ZELTWEG
Wer sich selbst einmal an solchen ATM-systemen versuchen möchte, der findet eine freie Open-Source Variante einer solchen Software unter ALBATROSS (http://www.albatross.aero/), die sogar von einigen Flugsicherungen als Fallback-system erprobt wird.
Quelle: http://www.albatross.aero/
Siehe auch dazu den Artikel „Wie kann eine Malaysian MH370 eigentlich verschwinden?“
Siehe auch dazu den Artikel "Woher kommt das Bild von Flightradar24 ?"